
Hands, LLMs, Humanoids and More: Some lower-profile releases you might've missed
A short list of cool things I saw on Twitter this week

A few cool things from this past week that you might have missed:
DG-5F Humanoid Hand from Tesollo
Korean robotics firm Tesollo released an impressive video of a robot hand in action.
The hand has 20 degrees of freedom, optional contact and force feedback, and ROS2 support for easy integration with your robot pipeline. It’s 1650 grams and with an up to 16 kg payload. All in all, a promising new hand option for humanoids. Find out more here.
The RLHF Book, First Draft
Nathan Lambert (who blogs at Interconnects) released the first draft of his book on reinforcement learning from human feedback; check it out here. I’ve covered RLHF at various times, like during my Deepseek R1 post:

It’s a huge part of how we train large language models, and this seems like a great reference.
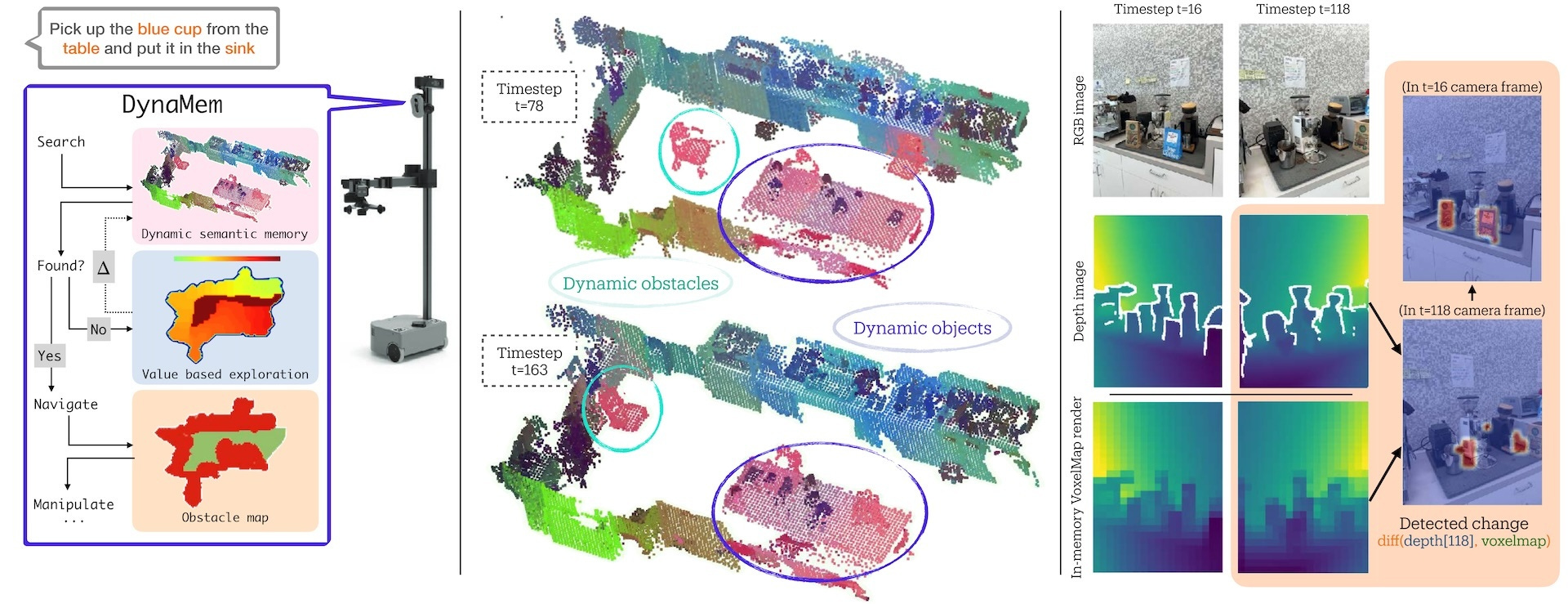
Indoor Object Navigation with LLMs

A team at CMU just released Sort3d, an open-source toolkit for 3d object navigation on real robots. Things like “go to the blue garbage bin by the wet floor sign:”
This video shows a selection of weird, unidentifiable (to me) robots that would only show up in a CMU release. Looks like a nice resource, and a solid baseline demonstrating how we can build powerful robot behaviors with available components.
embzip - new Embedding Quantization Library
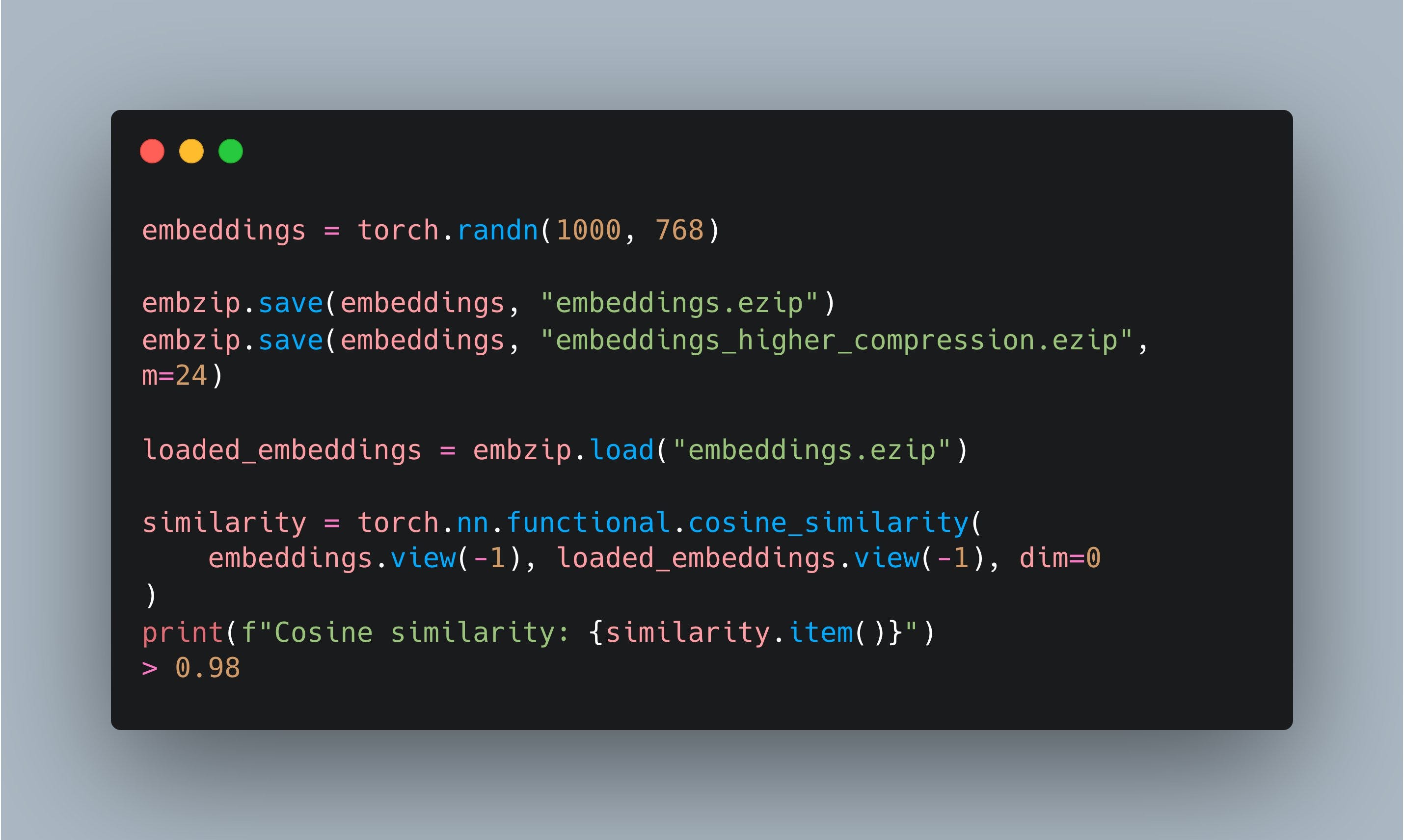
A big change of direction for this next one. Jack Morris released embzip, a library for storing high-dimensional embeddings. Check it out here.
Why do I, a roboticist, care about this? Because embeddings like this are a huge part of how we tell robots what to do and where to interact with the world.
Tools like this make it more reasonable to store large amounts of this information, which will help us build smarter and more interactive home robots.
Comparing VLAs
Igor Kulakov of SimpleAutomation has been doing some incredibly cool stuff with imitation learning:
He did a breakdown of how Pi0fast, Pi0, and Gr00t compared on his tasks, which you can and should check out on Twitter/X. Given a custom arm and a dataset of 100 trajectories:
Pi0 took 11 hours and ~$30 to train
Gr00t took 2 hours, but had some weird random movements during the trajectory
Pi0-fast was performing much worse than Pi0 (original), even after 6 hours of training, despite the claim being that it’s faster.
Compared to ACT, Gr00t and Pi0 show much better generalization (great!)
Inference longer than one frame, which resulted in jittery videos
He has a lot of videos and other details in the thread; check it out.
Borg’s Modular Humanoid, Made in Detroit

Borg is an interesting robotics company out of Detroit, which is building a whole lineup of modular robots: humanoids, quasi-humanoids with wheels, wheeled robots, etc. I think it’s a really solid way to build a company, since they can have exactly the right robot for every job. Toyota doesn’t just make one kind of car, after all — they make a range of cars for different jobs.
Final Notes
There’s a ton of cool stuff going on all the time in our field. We don’t need anyone else to post about Huggingface buying Pollen Robotics, or GPT-o3, or whatever, so I thought I’d do this round-up.
If you like what I write, please subscribe:
And consider sharing if it’s useful:
Otherwise, I’ll be back with more next time.
The modular robots look like an interesting concept.