


My Thoughts on Actuate 2024
+ Robotics and Embodied AI in the Bay Area

It’s been a long time since I’ve been in the bay area — over a year! — and during that time, so much has changed in the robotics and AI space. Nowhere was that change more obvious than at the Actuate conference by Foxglove.

The conference had a star-studded lineup of speakers starting with Sergey Levine of Stanford and Physical Intelligence. It touched on most areas of robotics, from foundation models and humanoids to very grounded robots for farming, lawn care, and logistics. During the event, we were running an autonomous pick-and-place demo to show what you can do with the Stretch robots as well.

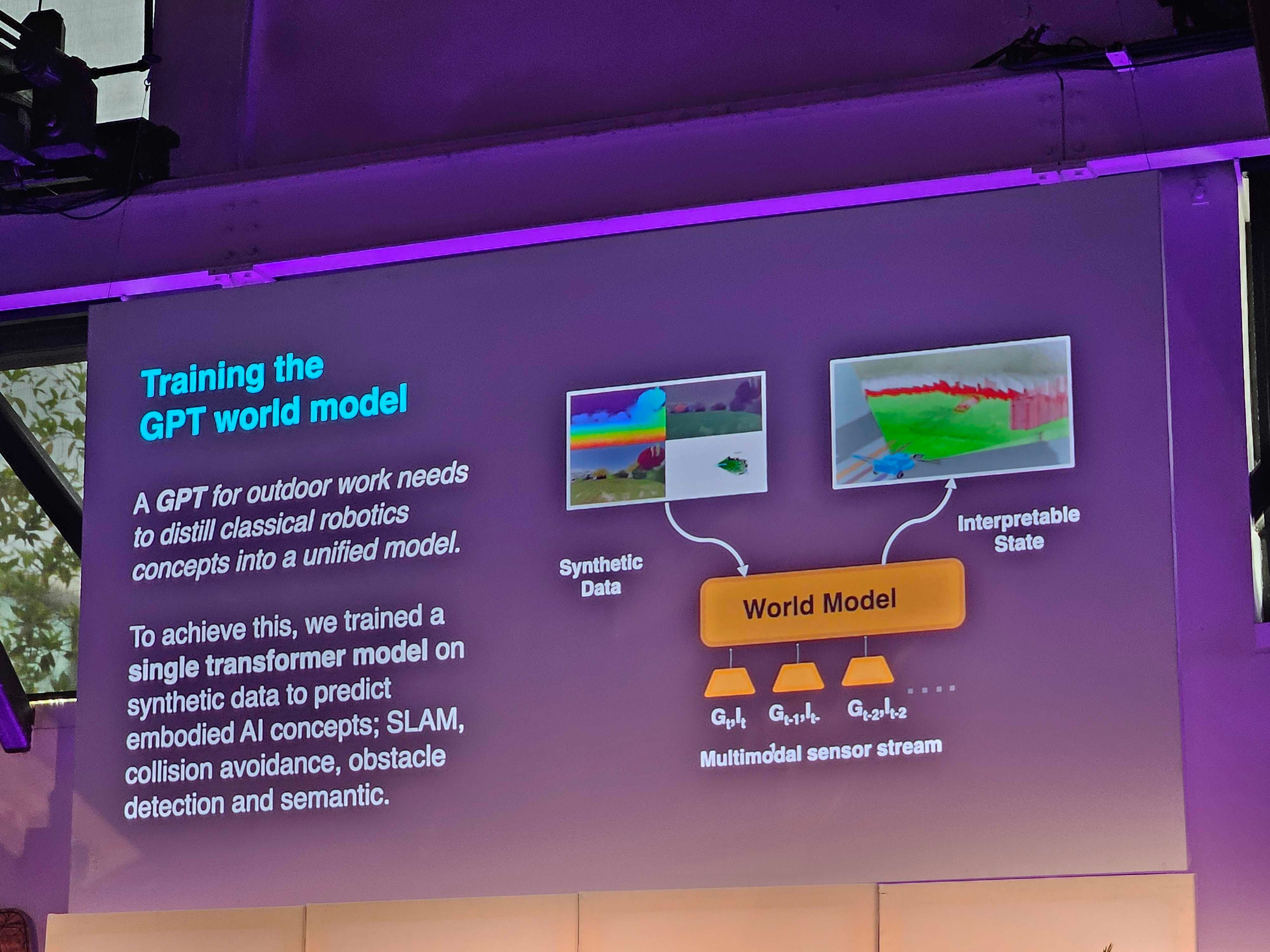
The conference covered the range of robotics problems. There were actually only a couple talks which even touched on foundation models - there’s the inimitable Sergey Levine, of course, but also Michael Laskey talked about how they use NVIDIA Omniverse to train their own world model for landscaping tasks.
But the majority of the talks were much more technical. Discussions on things like ROS2 middleware, the past, present, and future of the Nav2 stack, sober discussions on the role of simulation in robotics, and sensor calibration.

So, not all end to end; not all giant transformer models (although of course everyone was excited about those!)
Personally, I think this is great. It seems obvious end-to-end learning is the future, but we need people to try different solutions and approaches, and how close that future is, remains a completely different question which a lot of intelligent people can strongly disagree on.
The Robotics Scene Today
I think the biggest takeaway I had was how huge and lively the robotics world is right now. There are tons of people building products to help robotics companies get off the ground - not just the obvious Foxglove (which builds a visualization tool which is a vast improvement over things like RVIZ), but tools like ReSim (which manages your virtual testing infrastructure).
And there were tons of smaller companies too, especially a crop of YC24 startups that are all tackling interesting and important problems. You have companies like Krang AI doing data collection, Miru Robotics doing docker-based deployment infrastructure (something which deserves a post of it’s own, big believer in Docker), and many others.

All in all: we have a lot of people, trying lots of different approaches, but all of them are taking real steps towards deploying real robotic systems in the real world. The future, to me, seems really bright.
Looking forward to the next one.