
Robot Hands Are Getting Better
A short look at why robot hands are hard and what research is being done


Robots need to be able to interact with the world in order to be useful. They do this in many ways: by driving around and taking pictures during inspection tasks, by walking up and down stairs. Military robots often interact with the world by exploding. But increasingly, we want useful robots to manipulate their environment and perform human-level tasks, which requires a gripper or hand.
The problem is that human hands are incredibly capable — they’re a high bar. Human hands are strong, light, adaptive, and self-healing. The human fingertip has ~2,500 touch receptors per square centimeter, with roughly 22 degrees of freedom. It can move at high speeds while applying significant force.
Building a robot hand that can match human capabilities, then, is very difficult. But robot hands have seen incredibly rapid change over the last couple years. You might have seen incredible manipulation demos from companies like Sharpa Robotics. The Sharpa Wave hand is part of a new generation of robot hands which nearly match human capabilities.
Now we have hands like this one, which is $600 and precise and compliant enough to pick up a raspberry without smashing it:
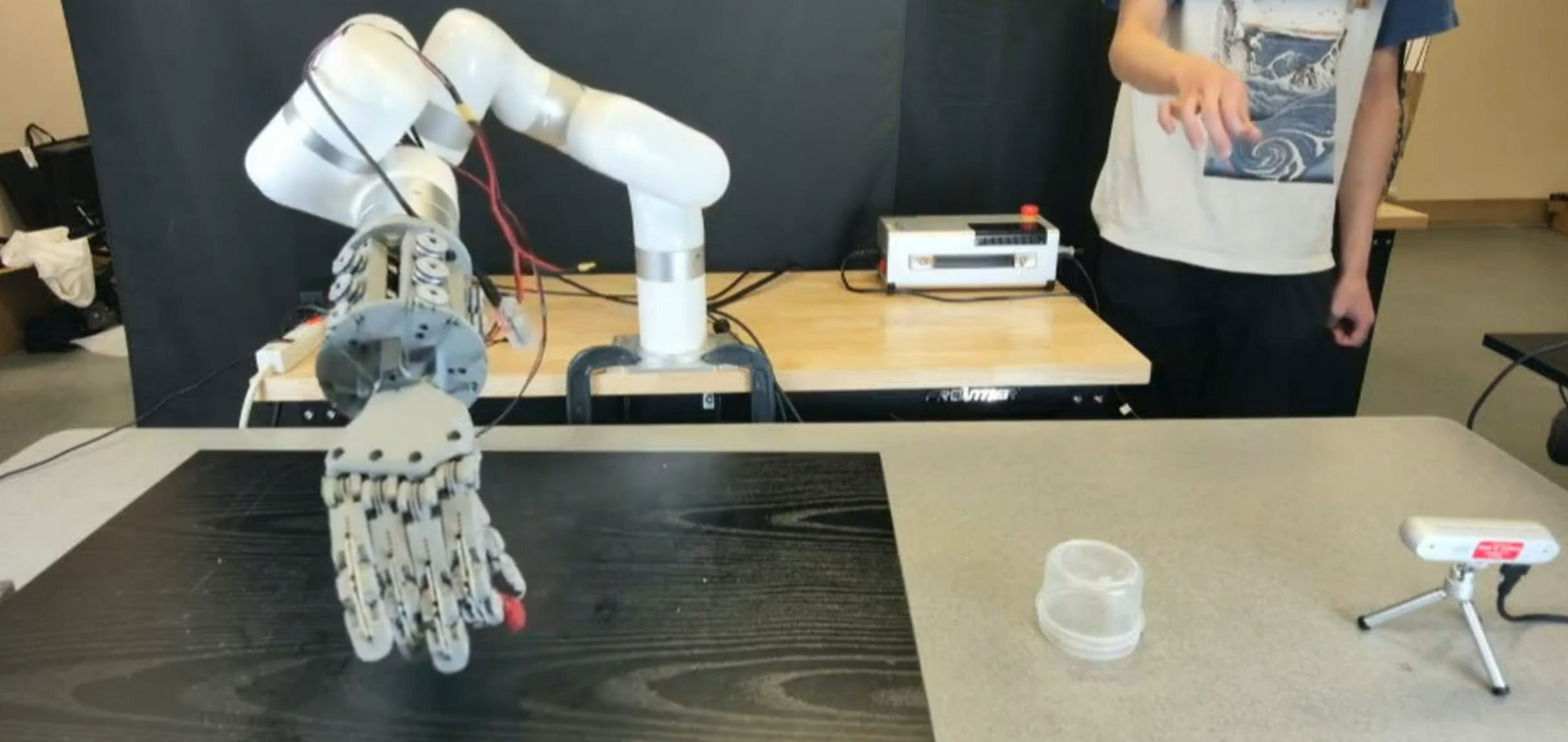
This is a great task for a few reasons: a raspberry is obviously very tiny, but it’s also squishy, soft and easily damaged. The CRAFT hand was made by researchers at UIUC and UC Irvine, led by Prof. Unnat Jain. The price tag is incredible, at only $600, and the plans for building it are open source. But there are a wide range of open-source robot hands coming out now, as well as an increasing range of commercial options.
So, let’s talk about robot hands. What are the key design decisions? Which one should you get? How do you make sense of all this? If you find this interesting, please subscribe and share.
Why Do We Even Need Hands?
The most common robot hands, like those mounted on the YAM or ALOHA arms, have only a single degree of freedom: opening and closing. And this is enough for an incredibly wide range of tasks, as Physical Intelligence is so adept at demonstrating. Obviously we do not need hands on our robots then:

But of course, no one sees a demo of something that doesn’t work; robots aren’t deployed doing things that cannot be automated. And indeed it turns out that lots of tasks can’t be done without multiple fingers: in-hand reorientation of an object, for example. And solidly grasping long, thin objects — even managing door handles — can be difficult.
While the limitations of simple two-finger grippers are not an issue in relatively-controlled industrial settings, and for simple pick-and-place tasks of small, low-mass objects, this describes a minority of tasks that we might care about. Things that we need higher-DOF dexterous hands to do include:
Very stable manipulation of objects with a wide range of masses
Robust handling of long or thin objects
Tool use, especially for any tool that is designed to also support humans
For a truly general-purpose robot, robot hands need to get a lot better. But this itself is a huge issue; human hands have a frankly incredible mix of robustness, ability to apply force, sensor density, and dexterity, with degrees of freedom comparable to entire humanoid robot platforms.
Fortunately, many people are working on this.
Types of Robot Hands
Robot hand design has to trade off between many different conditions:
Strength - how much force it can apply
Compactness - how big the hand is — human size being ideal for video learning
Precision - how accurately can it servo to different positions
Affordability - how expensive is it?
Robustness - how often does it break
Human hands can apply a huge amount of force in a very small and very durable package, and two of them are attached essentially to every human. They therefore max out nearly every one of these conditions. Robot hands lag behind a bit. To understand why, we need to talk about how robots actually actuate and interact with the world.
A large part of the modern “humanoid revolution” and the scalability of robot quadrupeds is the use of quasi-direct-drive (QDD) actuation pioneered by the MIT Mini Cheetah. Quasi-direct-drive here usually means a low-gear ratio planetary gear assembly, connected “directly” to the joint that it’s moving.
This gives a great tradeoff between force transparency (equivalence between applied and measured forces), and backdriveability (ability to “push” a joint backwards without exerting extra force).
These two qualities are extremely important for robot hands, which are constantly colliding with things, and thus experiencing forces all the time! These forces can easily translate to robot damage, and so a non-backdriveable hand with poor force transparency can be easily destroyed by simple interactions.
The problem is that putting the big motors that you need in order to make a robot work are not (normally) going to fit in a human hand as they would for the leg of a quadruped or the arm of a humanoid robot. To exert the forces you want to firmly grasp and hold objects, then, you need higher gear ratios, which hurts backdriveability and has downstream effects on performance. In addition, these servos also mean more weight in the fingers, which causes its own performance problems and further increases the need for powerful servos further up the kinematic chain.
Broadly, there are two classes of solutions to the problem:
Tendon-driven hands, like the ORCA hand, put the motors outside the fingers and connect them to joints via a tendon of some kind.
Direct-drive hands like those from market leaders like Wuji and Sharpa, whose strategy revolves around building smaller and smaller motors to actually fit into the individual joints of the hand, using a higher gear ratio plus active compliance to achieve backdrivability.
This blog post by Quanting Xie, Tongzhou Liao, and Yonatan Bisk called the Dexterity Deadlock is a good read for more on the topic.
And there’s another connected issue. Once we are starting to pack lots of actuating power into a small form factor, we might need to make trade-offs and reduce the number of motors. This cuts the number of active (actuated) degrees of freedom of the hand, but results in lower cost, weight, and can save size as well. Notably, even human hands have passive degrees of freedom (the top joint on your finger usually cannot move independently of the others) — even Mother Nature struggles to produce a perfect hand.
It’s also possible that the actuation problem above needs to be solved by wholly new technology. One example of a team trying to do this is Daxo Robotics, which is working on soft or continuum robot hands which lack rigid links and thus technically have “infinite” degrees of freedom, similar to human muscles. These technologies are currently harder to manufacture, but this might be solvable; and they can take a lot more punishment than many traditional hands. For more you can check out our podcast episode from last year:

Open Source Hands
We have a very large design space of tradeoffs in robustness, strength, cost, weight, and flexibility to explore, in order to try to build robot hands that can get close to human level performance. Much of the research I’ve seen looks at tendon-driven hands: academic researchers aren’t spinning their own motors or building custom high-precision gearing in the same way as an industrial hand manufacturer might be.
Another huge issue for researchers is the high cost of current hands: the best hands like the Sharpa Wave are often over $50,000 each, meaning that the whole cost of a robot can be dwarfed by the pair of hands mounted on the ends of its arms.
So there have been a couple recent efforts to build good, high-quality open-source hands. Take, for example, the RUKA hand from NYU, a <$1300 tendon-driven hand with 6 active and 15 total degrees of freedom for compliant grasping. It’s slightly bulkier than a human hand and has less degrees of freedom, but is lightweight and much more affordable.
Another example would be the LEAP hand (v1, v2); the v2 hand has 8 active dof, which makes it slightly more capable of adapting to different tasks and means it can be used for, for example, in-hand reorientation of objects. It’s much bigger than a human hand, being more similar to the Allegro hand in size, but still costs only ~$2000. The advanced version is even better, at $3000 and 22 dof, roughly human level.
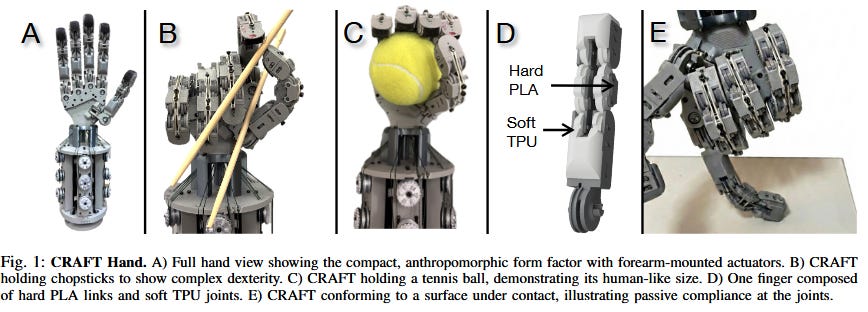
The recent CRAFT hand actually starts to approach human capability on paper, with 15 active and 5 passive degrees of freedom, plus good compliance and actuation with lightweight fingers and for about $600. It’s a 3D printed hybrid hard-soft hand, which means that its finger joints use soft thermoplastic polyurethane, aiming to make sure that it can conform and make contact smoothly and robustly without taking damage from applying too much force to an object.
There are many more researchers working on novel types of robot hands; given how difficult the problem is, it is great that so many open, printable and hackable ideas are being produced to drive the area forward.
A New Wave of Hand-Centric Startups
And of course now there are a wave of robot hand startups appearing. This will not, by any means, be an exhaustive list of hands, just a few representative examples to talk about new entrants to the space over the last couple years. There are of course an older wave of hand companies like the Shadow Robot dexterous hand series — these too are out of scope for this post.
Some examples, but by no means an all-inclusive list:
Sharpa: Singapore-based Sharpa is probably the industry leader at the moment, building hands which are a near match for human capability. They have done a number of impressive demos, including one where they show their 63-DOF Sharpa North robot peeling an apple with an apple peeler.
Linkerbot is seeking a $6 billion valuation for a new round of funding (as per Reuters) and is mostly known for its robot hands. There are robot hands like the Linkerbot o6 which are roughly $1500, though this one is only 6 dof.
BrainCo’s Revo 2 DuraX hands focus heavily on durability. The hands have been demonstrated many times as prosthetics to replace amputated limbs, similar to Psyonic hands. While the Revo 2 had only six active degrees of freedom and was relatively cheap, they’re moving towards higher-DOF and thus more expensive hands with the Revo 3, which will also integrate tactile sensing.
The Psyonic Ability hand is another durable hand with only 6 active degrees of freedom, designed first for prosthetics and featuring built-in pressure sensors.
Inspire hands are a commonly-used cheap robot hand, also with six active degrees of freedom.
There are many others of course. But the trend here is clearly towards higher degrees of freedom and more tactile density, with the SharpaWave being very similar to a human hand in terms of raw specifications: it has roughly 1,000 tactile pixels per fingertip and 22 active degrees of freedom, vs. roughly 21 for a human (depending on how you count).
What Issues Remain
The big open challenges in hands, as I see it, are:
High cost. Robot hands are expensive. Two $50,000 USD SharpaWave hands may be the best on the market, but they will cost you more than your entire robot.
Reliability. Human hands take constant impacts and bounce back, partly because they are ablative (covered in regrowing skin and muscle that heals on its own). Robot hands are notoriously finicky; even very robust hands like some of the prosthetics mentioned above won’t match human reliability.
Sensing. Part of why human hands are robust is also just that we use them better: we avoid damage to our hands, we respond very quickly to heat or pressure by instinct. This is served by a network of dense tactile sensors and built-in whole body control behaviors centered around preventing damage.
None of these issues, I think, are insurmountable, but all will take dedicated work. There’s no “perfect” hand on the market now, which is part of why so many research labs have decided to build their own.
Final Thoughts
This is a blog post without a real lesson, just an observation. There’s a lot of companies and researchers out there trying to solve the problem of human-level dexterity. Now, for the first time, there really appear to be roughly human equivalent hands, in terms of dexterity and sensing if not manufacturability, strength, and robustness.
But these remaining issues will be resolved. This has real implications; as Avik De and I wrote about in our recent article on the changing nature of robotics research, hand researchers will shortly need to “move up the value chain” away from the kinds of fundamental work they are doing now.

{kind=link}
There’s no version of the world, I think, where in 5 years there are not good, dexterous, capable hands for a few thousand dollars price, ready for integration into different robots and products.
You should probably plan accordingly.
References
Lin, L., Patel, S., Moon, J., Lazebnik, S., & Jain, U. (2026). CRAFT: A Tendon-Driven Hand with Hybrid Hard-Soft Compliance. arXiv:2603.12120. Project page: https://craft-hand.github.io/
Zorin, A., Guzey, I., Yan, B., Iyer, A., Kondrich, L., Bhattasali, N. X., & Pinto, L. (2025). RUKA: Rethinking the Design of Humanoid Hands with Learning. Robotics: Science and Systems (RSS). Project Page: ruka-hand.github.io
Xie, Q., Liao, T., & Bisk, Y. (2026, February 12). The Dexterity Deadlock. Origami Robotics. Article: origami-robotics.com/blog/dexterity-deadlocks
Shaw, K., Agarwal, A., & Pathak, D. (2023). LEAP Hand: Low-Cost, Efficient, and Anthropomorphic Hand for Robot Learning. Robotics: Science and Systems (RSS). Project Page: leaphand.com
LEAP Hand v2 Advanced: Dexterous, Low-cost Hybrid Rigid-Soft Hand for Robot Learning. (2024/2026). Project Pages: v2.leaphand.com / v2-adv.leaphand.com