
Why is Everyone's Robot Folding Clothes?
And what does it tell us about the state of modern robot learning?

It seems like every day this week there’s been a new video on X of a robot folding clothes. We’ve had some fantastic videos, like this semi-autonomous video from Weave Robotics on X:
This is awesome stuff, and the Weave robot can certainly do more than this too, as you can see on their website. But Weave is far from the only company producing these kinds of videos.
We’ve seen videos of Figure F02 folding clothes. Physical Intelligence launched their flagship vision-language-action model, pi0, with an amazing video of a robot folding clothes after unloading a laundry machine. You can see robots folding clothes live at robotics expos. And even before all this, Google showed clothes folding in their work, ALOHA unleashed. Now, 7X Tech is even planning to sell robots to fold clothes!
And that’s not even mentioning all the clothes-folding-like tasks, like Dyna’s napkin folding — which leads to what is probably my top robot video of the year, with 18 hours of continuous napkin folding.
So why is everyone suddenly folding stuff? I think there are a few reasons.
We basically couldn’t do this before.
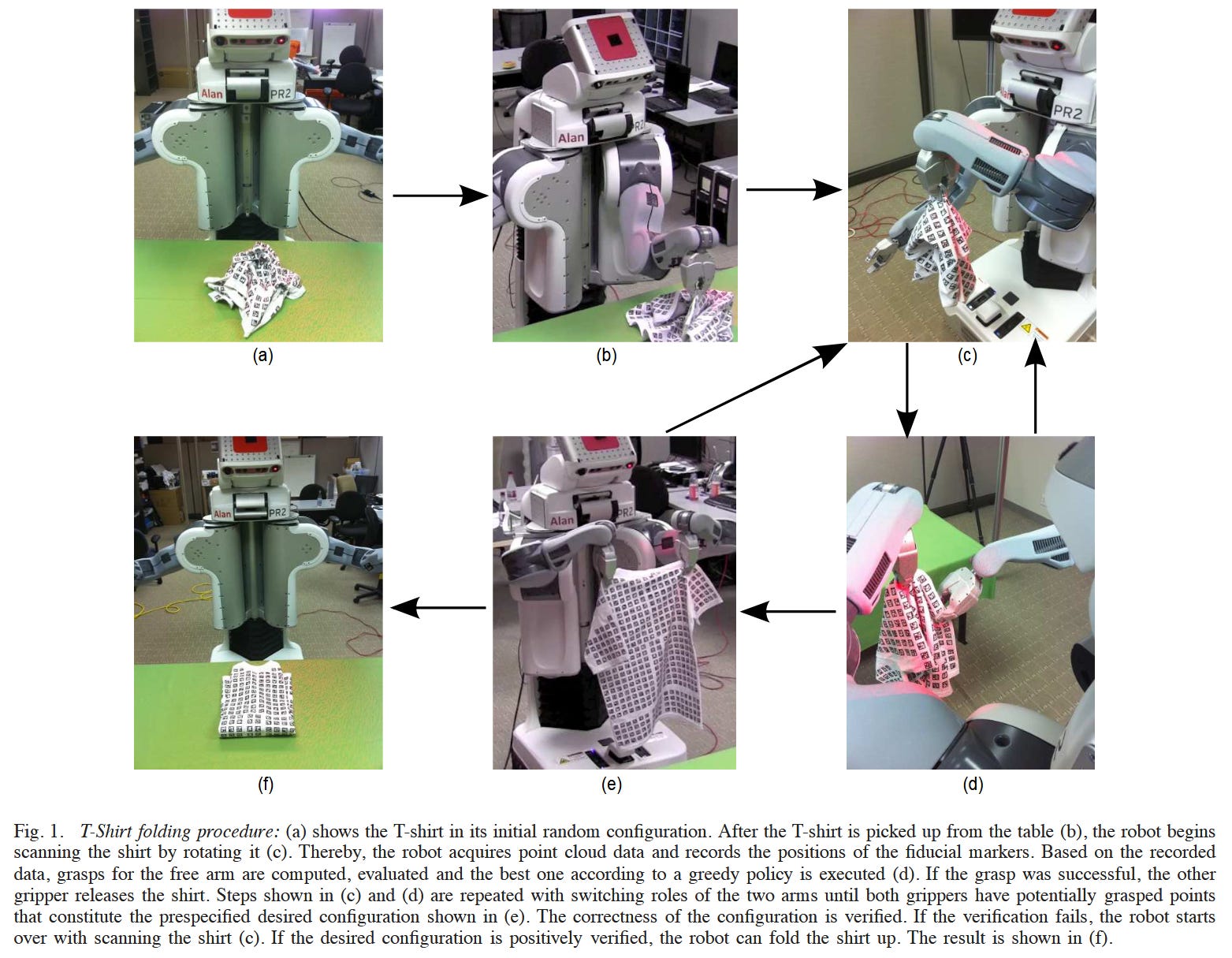
Sure, there are works going back fairly far that do some amount of robot clothes folding. But these were always extremely brittle, extremely slow, and not even remotely “production ready.” By contrast, modern imitation learning systems seem to be quite well suited for folding cloths; it’s a problem that people have been able to reproduce very easily.
It looks great and people want it!
A lot of us have this “north star” of a robot butler which can do all the chores we don’t want to do. Mention clothes folding on X, and many, many people will chime in about how they don’t ever want to fold clothes again and are ready to part with basically any amount of money to make that happen.
It avoids all the stuff we’re still bad at.
Clothes folding is also just a great task for modern imitation learning methods:
It’s fundamentally about predicting sequences of largely non-interactive trajectories, meaning that there’s minimal force being applied at any given time.
You need a good amount of precision, but not too much precision. It’s very forgiving of small mistakes, and you can use really low-cost hardware (as 7X is planning to do, to sell affordable in-home folding robots).
Cameras can be carefully positioned and can remain fixed (so huge props to Physical Intelligence and Weave Robotics who do without this, using a mobile robot!).
It’s very repeatable, and very easy to reset — practically self resetting — making it a great test task for an autonomy stack, since you can collect a lot of data very quickly.
Modern learning methods will come with their own strengths and weaknesses; it seems that, while not easy, clothes folding is the kind of task that’s just really well suited for what our models can do right now. So expect to see a lot more of it.
Seems like the classic situation when new technology must be motivated by “do the same stuff more easily” whereas the real impact is “do entirely new stuff that you never thought of before”. For me folding clothes seems like missing the point (i get you have to start somewhere though)
Moravec's Paradox offers a fascinating perspective on how evolution has shaped our capabilities. This tells us something profound about human evolution: it has invested far more time and effort in perfecting our sensorimotor skills than in what we call "abstract intelligence."
Maybe we still need to invest on these skills on real robotics, as I feel that we have invested far more in AI.